Шаговый двигатель принцип работы википедия: HTTP 429 — too many requests, слишком много запросов
Шаговый двигатель
Дмитрий Левкин
- Конструкция
- Характеристики
Предшественником шагового двигателя является серводвигатель.
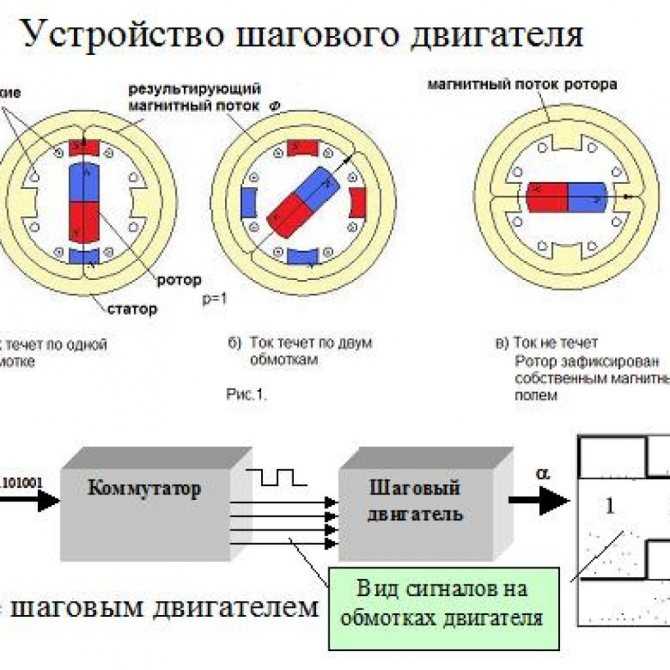
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
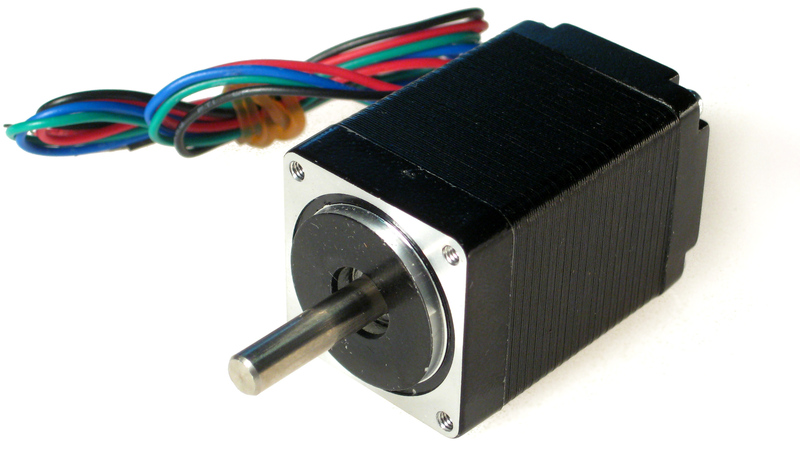
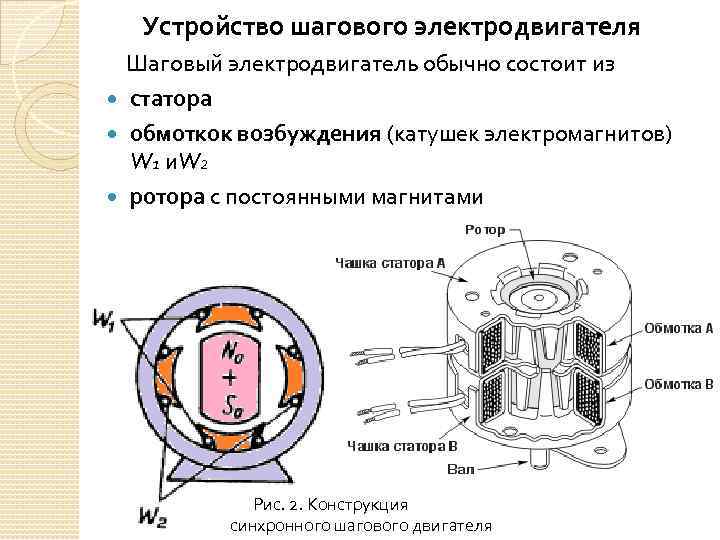
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
- По конструкции ротора выделяют три типа шаговых двигателей:
- реактивный;
- с постоянными магнитами;
- гибридный.
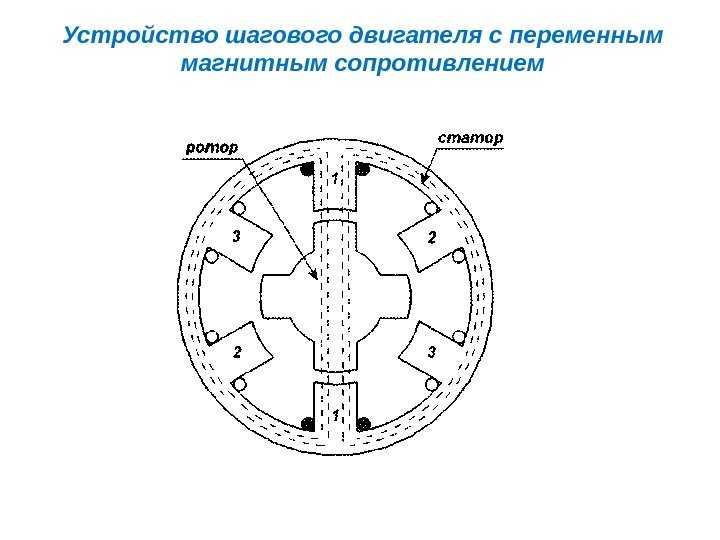
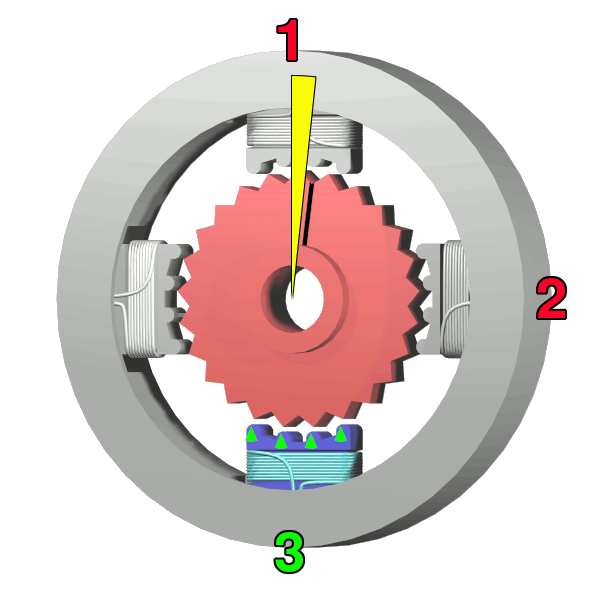
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже. Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.


Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
- Таким образом по виду обмоток выделяют два типа шаговых двигателей:
- униполярный (однополярный),
- биполярный (двухполярный).
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре.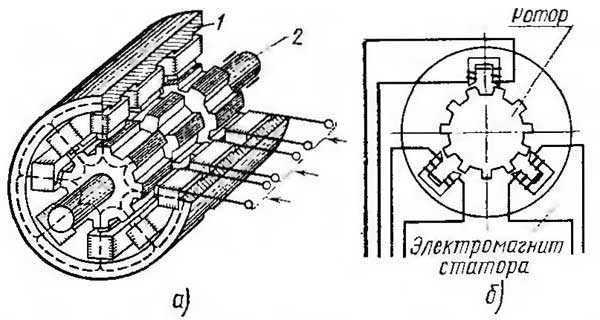 Каждая секция обмотки включается отдельно.
Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом. Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
- Существует несколько способов управления:
- волновое,
- полношаговое,
- полушаговое.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления.Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы.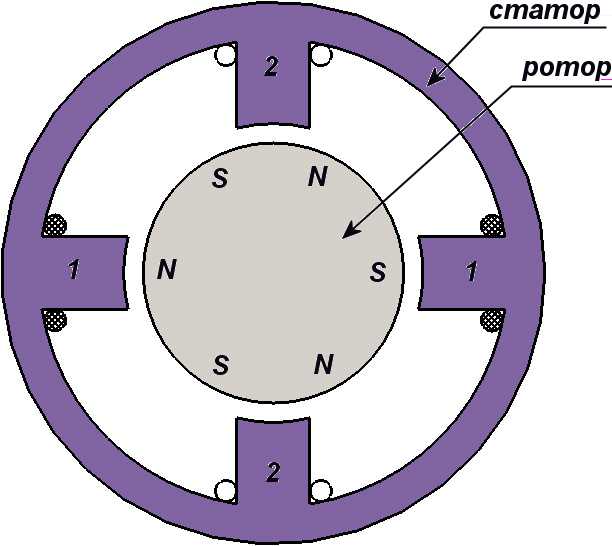 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.
Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток.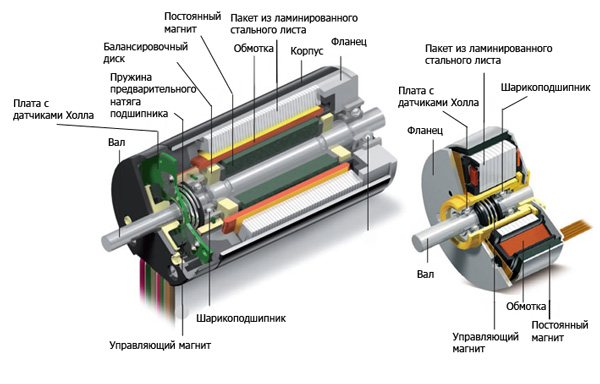 При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
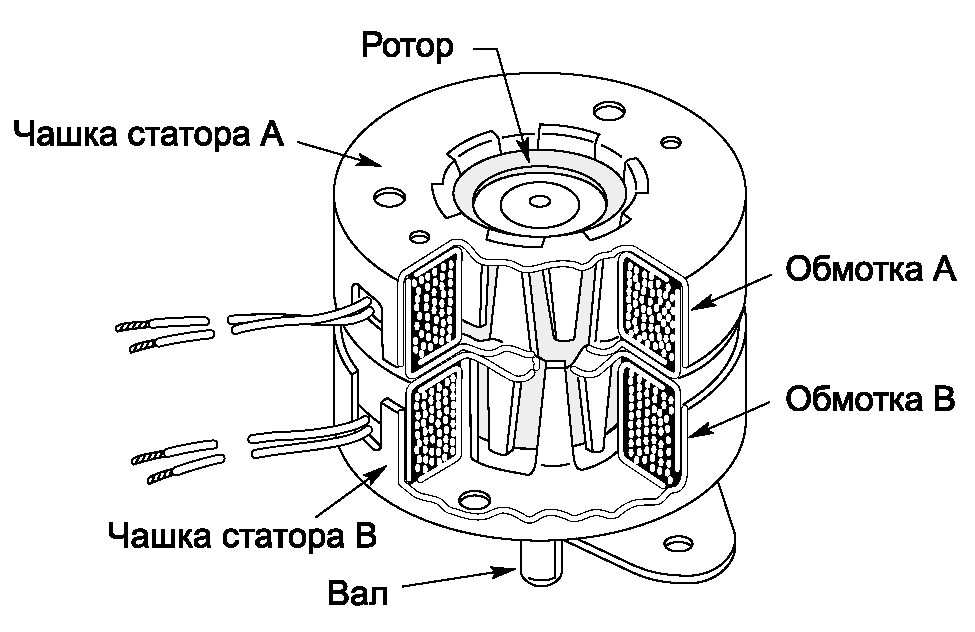
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
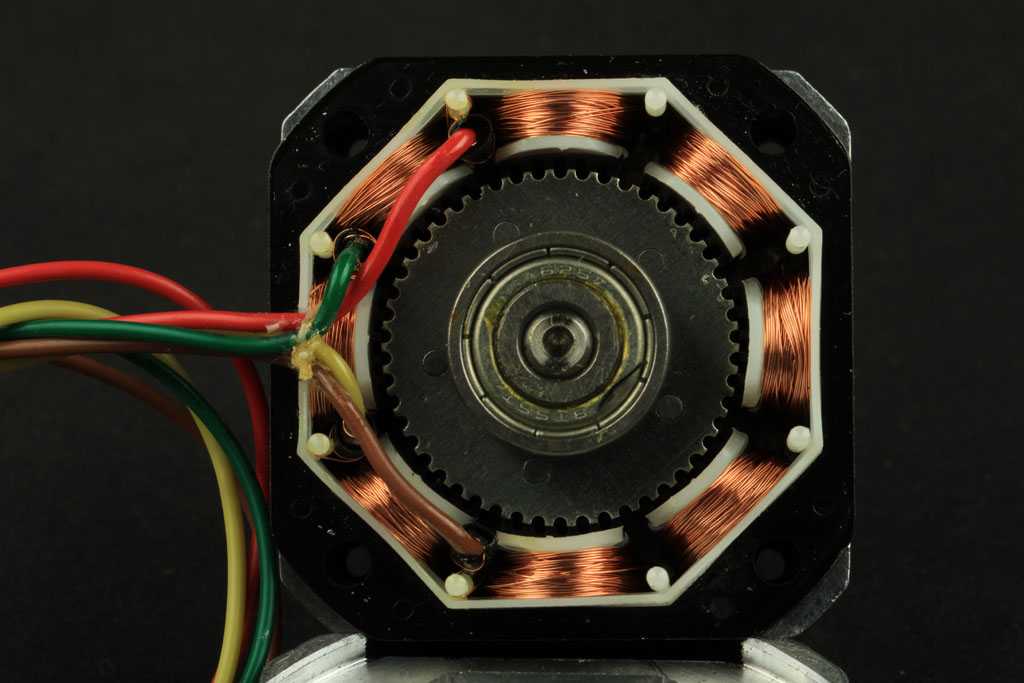
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
 Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
Библиографический список
Схема управления шаговым двигателем и принцип работы
ШАГОВЫЕ ДВИГАТЕЛИ — ПРИНЦИП РАБОТЫ
Шаговые двигатели — это устройства, задача которых преобразование электрических импульсов в поворот вала двигателя на определённый угол, для совершения механической работы, приводящей в движение различные механизмы.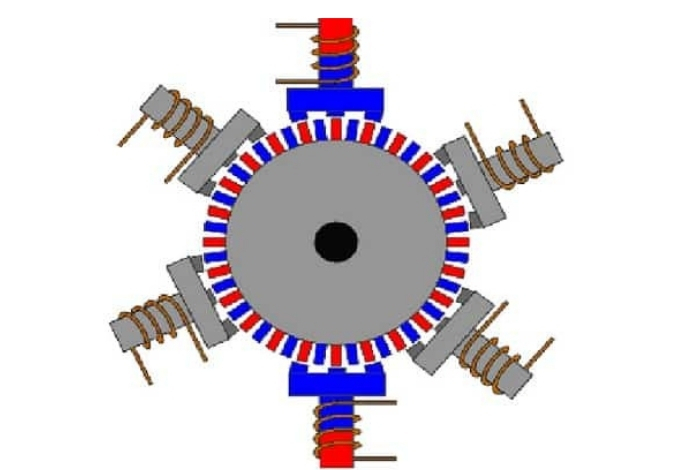
Принцип работы шаговых двигателей
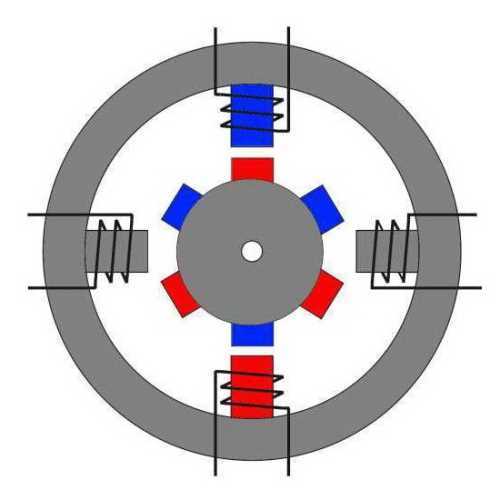
Принцип работы шаговых двигателей можно изложить кратко. ШД, как и все типы двигателей, состоят из статора (состоящего из катушек (обмоток)) и ротора, на котором установлены постоянные магниты.
На картинке изображены 4 обмотки, расположенные на статоре под углом в 90 градусов относительно друг друга. Тип обмотки зависит от конкретного типа подключения шагового двигателя (как подключить шаговый двигатель).На примере выше обмотки двигателя не соединены, значит двигатель с такой схемой имеет шаг поворота в 90 градусов. Обмотки задействуются поочередно по часовой стрелке, а направление вращения вала двигателя обусловлено порядком задействования обмоток. Вал двигателя вращается на 90 градусов каждый раз, когда через очередную катушку протекает ток.
Шаговые двигатели — применение
Область применения шаговых двигателей довольно широка, они используются в промышленности, в принтерах, автоматических инструментах, приводах дисководов, автомобильных приборных панелях и других приложениях, требующих высокой точности позиционирования.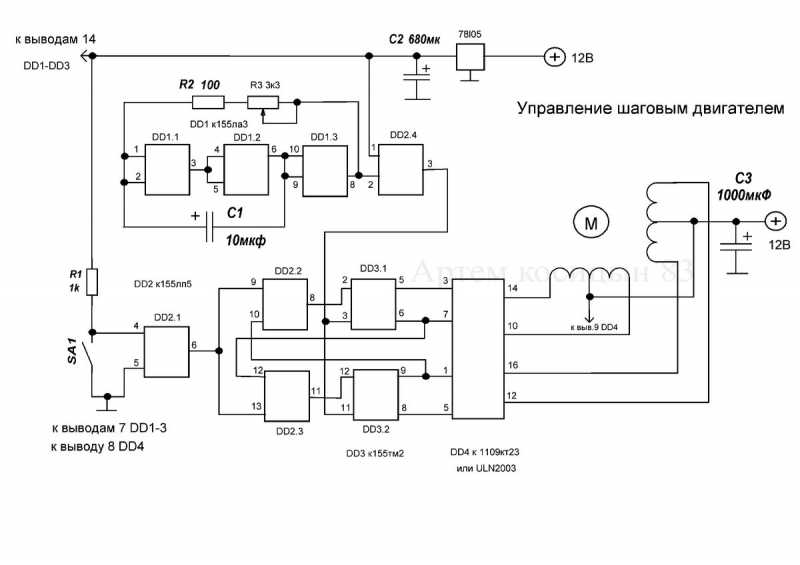
Принято различать шаговые двигатели и серводвигатели. Принцип их действия во многом похож, и многие контроллеры могут работать с обоими типами. Серводвигатели требуют наличия в системе управления датчика обратной связи по скорости и/или положению, в качестве которого обычно используется энкодер. Шаговые двигатели преимущественно используются в системах без обратных связей, требующих небольших ускорений при движении. В то время как синхронные сервомоторы обычно используются в скоростных высокодинамичных системах.
Шаговые двигатели (ШД) делятся на две разновидности: двигатели с постоянными магнитами (униполярные и биполярные) и двигатели с переменным магнитным сопротивлением (гибридные двигатели). С точки зрения контроллера отличие между ними отсутствует. Двигатели с постоянными магнитами обычно имеют две независимые обмотки, у которых может присутствовать или отсутствовать срединный отвод (см. рис. 1).
Биполярные шаговые двигатели с постоянными магнитами и гибридные двигатели сконструированы более просто, чем униполярные двигатели, обмотки в них не имеют центрального отвода (см.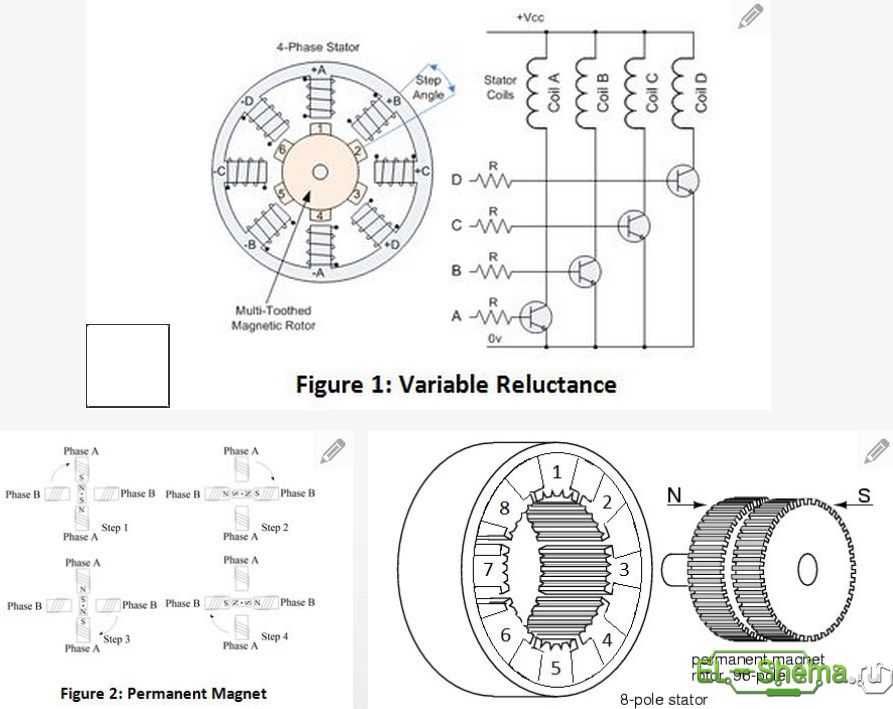 рис. 2).
рис. 2).
Шаговые двигатели имеют широкий диапазон угловых разрешений. Более грубые моторы обычно вращаются на 90° за шаг, в то время как прецизионные двигатели могут иметь разрешение 1,8° или 0,72° на шаг. Если контроллер позволяет, то возможно использование полушагового режима или режима с более мелким дроблением шага (микрошаговый режим), при этом на обмотки подаются дробные значения напряжений, зачастую формируемые при помощи ШИМ-модуляции.
Для правильного управления биполярным шаговым двигателем необходима электрическая схема, которая должна выполнять функции старта, стопа, реверса и изменения скорости. Шаговый двигатель транслирует последовательность цифровых переключений в движение. «Вращающееся» магнитное поле обеспечивается соответствующими переключениями напряжений на обмотках. Вслед за этим полем будет вращаться ротор, соединенный посредством редуктора с выходным валом двигателя.
Каждая серия содержит высокопроизводительные компоненты, отвечающие все возрастающим требованиям к характеристикам современных электронных применений.
Управление биполярным шаговым двигателем требует наличия мостовой схемы. Эта схема позволит независимо менять полярность напряжения на каждой обмотке.
На рисунке 3 показана последовательность управления для режима с единичным шагом.
На рисунке 4 показана последовательность для полушагового управления.
Максимальная скорость движения определяется физическими возможностями шагового двигателя. При этом скорость регулируется путем изменения размера шага. Более крупные шаги соответствуют большей скорости движения.
В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению вала двигателя.
Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель, то можно обойтись без датчика обратной связи (Дт) и упростить систему управления двигателем (СУ), так как отпадает необходимость использования в ней цифро-аналоговых (ЦАП) и аналого-цифровых (АЦП) преобразователей.
Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта.
Шаговые двигатели различаются по конструктивным группам: активного типа (с постоянными магнитами), реактивного типа и индукторные.
Шаговые синхронные двигатели активного типа
Принцип действия шагового двигателя активного типа рассмотрим на примере двухфазного двигателя.
Различают два вида коммутации обмотки шагового двигателя: симметричная и несимметричная.
При симметричной системе коммутации на всех четырех тактах возбуждается одинаковое число обмоток управления.
При несимметричной системе коммутации четным и нечетным тактам соответствует различное число возбужденных обмоток управления.
Ротор у шагового двигателя активного типа представляет собой постоянный магнит, при числе пар полюсов больше 1, выполненный в виде «звездочки».
Число тактов KT системы управления называют количеством состояний коммутатора на периоде его работы T. Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
Как видно из рисунков для симметричной системы управления KT=4, а для несимметричной KT=8.
В общем случае число тактов KT зависит от числа обмоток управления (фаз статора) mу и может быть посчитано по формуле:
KT = mуn1n2,
где: n1=1 — при симметричной системе коммутации;
n1=2 — при несимметричной системе коммутации;
n2=1 — при однополярной коммутации;
n2=2 — при двуполярной коммутации.
При однополярной коммутации ток в обмотках управления протекает в одном направлении, а при двуполярной — в обеих. Синхронизирующий (электромагнитный) момент машины является результатом взаимодействия потока ротора с дискретно вращающимся магнитным полем статора. Под действием этого момента ротор стремится занять такое положение в пространстве машины, при котором оси потоков ротора и статора совпадают. Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Мы рассмотрели шаговые синхронные машины с одной парой полюсов (р=1). Реальные шаговые микродвигатели являются многополюсными (р>1). Для примера приведем двуполюсный трехфазный шаговый двигатель.
Двигатель с р парами полюсов имеет зубчатый ротор в виде звездочки с равномерно расположенными вдоль окружности 2р постоянными магнитами. Для многополюсной машины величина углового шага ротора равна:
αш=360/Ктр
Чем меньше шаг машины, тем точнее (по абсолютной величине) будет отрабатываться угол. Увеличение числа пар полюсов связано с технологическими возможностями и увеличением потока рассеяния. Поэтому р=4…6. Обычно величина шага ротора активных шаговых двигателей составляет десятки градусов.
Реактивные шаговые двигатели
У активных шаговых двигателей есть один существенный недостаток: у них крупный шаг, который может достигать десятков градусов.
Реактивные шаговые двигатели позволяют редуцировать частоту вращения ротора. В результате можно получить шаговые двигатели с угловым шагом, составляющим доли градуса.
Отличительной особенностью реактивного редукторного двигателя является расположение зубцов на полюсах статора.
При большом числе зубцов ротора Zр его угол поворота значительно меньше угла поворота поля статора.
Величина углового шага редукторного реактивного шагового двигателя определится выражением:
αш=360/КтZр
В выражении для KT величину n2 следует брать равной 1, т.к. изменение направления поля не влияет на положение ротора.
Электромагнитный синхронизирующий момент реактивного двигателя обусловлен, как и в случае обычного синхронного двигателя, разной величиной магнитных сопротивлений по продольной и поперечной осям двигателя.
Основным недостатком шагового реактивного двигателя является отсутствие синхронизирующего момента при обесточенных обмотках статора.
Повышение степени редукции шаговых двигателей, как активного типа, так и реактивного, можно достичь применением двух, трех и многопакетных конструкций. Зубцы статора каждого пакета сдвинуты относительно друг друга на часть зубцового деления. Если число пакетов два, то этот сдвиг равен 1/2 зубцового деления, если три, то — 1/3, и т.д. В то же время роторы-звездочки каждого из пакетов не имеют пространственного сдвига, т.е. оси их полюсов полностью совпадают. Такая конструкция сложнее в изготовлении и дороже однопакетной, и, кроме того, требует сложного коммутатора.
Индукторные (гибридные) шаговые двигатели. Стремление совместить преимущества активного шагового двигателя (большой удельный синхронизирующий момент на единицу объема, наличие фиксирующего момента) и реактивного шагового двигателя (малая величина шага) привело к созданию гибридных индукторных шаговых двигателей.
В настоящее время имеется большое число различных конструкций индукторных двигателей, различающихся числом фаз, размещением обмоток, способом фиксации ротора при обесточенном статоре и т.д. Во всех конструкциях индукторных шаговых двигателей вращающий момент создается за счет взаимодействия магнитного поля, создаваемого обмотками статора и постоянного магнита в зубчатой структуре воздушного зазора. При этом синхронизирующий момент шагового индукторного двигателя по природе является реактивным и создается намагничивающей силой обмоток статора, а постоянный магнит, расположенный либо на статоре, либо на роторе, создает фиксирующий момент, удерживающий ротор двигателя в заданном положении при отсутствии тока в обмотках статора.
По сравнению с шаговым двигателем реактивного типа у индукторного шагового двигателя при одинаковой величине шага больше синхронизирующий момент, лучшие энергетические и динамические характеристики
Линейные шаговые синхронные двигатели
При автоматизации производственных процессов весьма часто необходимо перемещать объекты в плоскости (например, в графопостроителях современных ЭВМ и т. д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
д.). В этом случае приходится применять преобразователь вращательного движения в поступательное с помощью кинематического механизма.
Линейные шаговые двигатели преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет упростить кинематическую схему различных электроприводов.
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом.
Зубцовые деления статора и подвижной части двигателя равны. Зубцовые деления в пределах одного магнито-провода ротора сдвинуты на половину зубцового деления t/2. Зубцовые деления второго магнитопровода сдвинуты относительно зубцовых делений первого магнитопровода на четверть зубцового деления t/4. Магнитное сопротивление потоку подмагничивания не зависит от положения подвижной части.
Принцип действия линейного шагового двигателя не отличается от принципа действия индукторного шагового двигателя.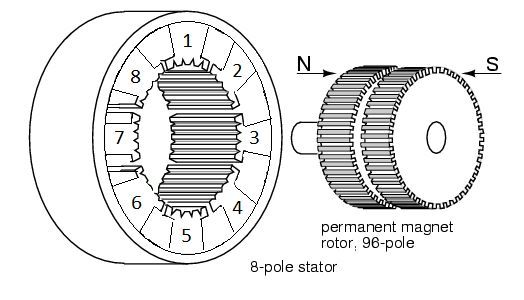 Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
Разница лишь в том, что при взаимодействии потока обмоток управления с переменной составляющей потока подмагничивания создается не момент, а сила FС, которая перемещает подвижную часть таким образом, чтобы против зубцов данного магнитопровода находились зубцы статора, т.е. на четверть зубцового деления t/4.
ΔXш=tz/Кt
где Kt — число тактов схемы управления.
Для перемещения объекта в плоскости по двум координатам применяются двухкоординатные линейные шаговые двигатели.
В линейных шаговых двигателях применяют магнито-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, что создает силу отталкивания ротора от статора. Таким образом, между статором и ротором создается воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
При этом обеспечивается минимальное сопротивление движению ротора и высокая точность позиционирования.
Важными характеристиками шагового двигателя являются: шаг, предельная механическая характеристика и приемистость.
Режим отработки единичных шагов соответствует частоте импульсов управления, подаваемых на обмотки шагового двигателя, при котором шаговый двигатель отрабатывает до прихода следующего импульса заданный угол вращения. Это значит, что в начале каждого шага угловая скорость вращения двигателя равна 0.
При этом возможны колебания углового вала двигателя относительно установившегося значения. Эти колебания обусловлены запасом кинетической энергии, которая была накоплена валом двигателя при отработке угла. Кинетическая энергия преобразуется в потери: механические, магнитные и электрические. Чем больше величина перечисленных потерь, тем быстрее заканчивается переходный процесс отработки единичного шага двигателем.
В процессе пуска ротор может отставать от потока статора на шаг и более; в результате может быть расхождение между числом шагов ротора и потока статора.
Предельная механическая характеристика — это зависимость максимального синхронизирующего момента от частоты управляющих импульсов.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления.
Приемистость падает с увеличением нагрузки.
DARXTON
Мотор
— Википедия, бесплатная энциклопедия
Для простого униполярного шагового двигателя, который может использоваться как для грейдера 90, так и для грейдера 45.
En Шаговый двигатель er en form for elektromotor hvis bevægelser kan styres i små vinkeltrin og dermed mere præcis end gængse elektromoterer.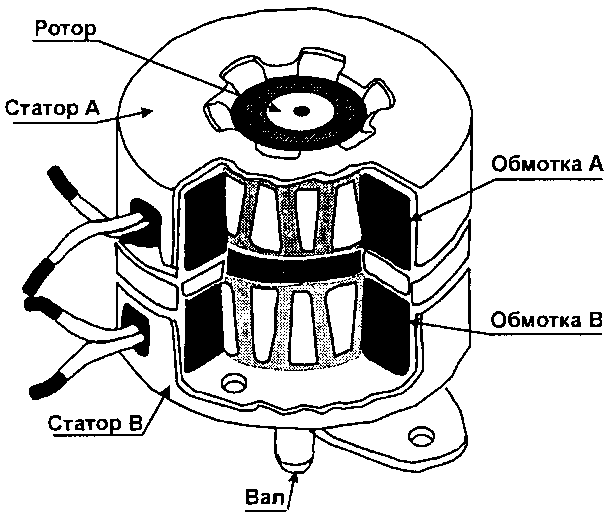 De bruges for exempel til and flytte læse/skrivehovedet CNC-maskiner, плоттер, принтер, CD-, DVD- и дискетный древ, робот и андрестедер, держите его в напряжении и хорошо держите кнопку, когда вы двигаетесь вперед, вперед. Til gengæld for den præcise styring er step-motorer mindre energieffektive end «normale» elektromotorer.
De bruges for exempel til and flytte læse/skrivehovedet CNC-maskiner, плоттер, принтер, CD-, DVD- и дискетный древ, робот и андрестедер, держите его в напряжении и хорошо держите кнопку, когда вы двигаетесь вперед, вперед. Til gengæld for den præcise styring er step-motorer mindre energieffektive end «normale» elektromotorer.
Som i almindelige elektromotorer findes der i step-motorer et antal elektriske spoler og evt. Постоянный магнит, мужчины имеют электродвигатель almindelige af sig selv omkobler strømmen i spolerne (через kommutatoren) så motoren bliver ved med at køre videre, skal der til step-motorer bruges noget extern elektronik til at рычаг струйного пульсера til de forskellige den spolerge i den spolerge i skal der til step-motorer bruges rækkefølge.
Hver impuls for motorens akse til at dreje sig en ganske bestemt vinkel, f.eks. 45 или 15 грейдеров, идущих в ногу со временем, соединенных с рычагом и лучшим импульсным двигателем, который может управлять двигателем, пока он не станет длиннее, чем аксе с большим усилием, дер эр и др. Многогранник с углом наклона 45°, 15° или 15°. Og ved at bytte om på den rækkefølge som spolerne modtager deres elektriske pulser i, kan man skifte omløbsretning.
Многогранник с углом наклона 45°, 15° или 15°. Og ved at bytte om på den rækkefølge som spolerne modtager deres elektriske pulser i, kan man skifte omløbsretning.
Шаговый двигатель не может быть «корт» в позиции ønskede, kan man opretholde en såkaldt «holdestrøm» i de spoler, der modtog den sidste impuls: Så virker motoren som en slags låse- eller bremseanordning der søger engine atsholdeaktu gen atsholdeaktuger .
Вращение шаговых двигателей er sammensat af 2 dele; inertimoment (dynamisk) og drejningsmoment fra strømmene gennem spolerne. Drejningsmomentet в шаговом двигателе с постоянными магнитами, который находит кун, når роторы nordpoler ikke er lige ud for statorens sydeller nordpoler. Drejningsmomentet er maximalt for en vilkårlig strøm forskellig fra nul, når роторенс нор-ог сидполер эр halvvejs mellem statorens нор-ог сидполер.
Der er følgende typer и шаговый двигатель:
- Постоянный магнит
- Bipolar – 4 группы, der er forbundet parvis i serie. Har normalt 4 тиледнингер. 2 на сполепар.
- Unipolar – 4 полки для мужчин, предназначенных для размещения отдельных участков в ряду, средиземноморских. Кан имеет фра 5..8 тилледнингер.
- Bipolar – 4 группы, der er forbundet parvis i serie.
- Reluktans, uden постоянный магнит – может иметь фларе spoler.
 Har normalt 4 тиледнингер. 2 на сполепар.
Har normalt 4 тиледнингер. 2 на сполепар.Hvis man i en reluktans step-motor frakobler strømmen Helt, er der ikke noget der «holder» på motorens aksel: Så kan man med handkraft eller andre motorer relativt nemt dreje akslen rundt.
Simpelt set kræver det 2 sinusformede vekselstrømme 90 grader forskudt, som f.eks. kan fås via 2 brokoblede lineare strømeffektforstærkere (=H-broer, fuld-broer). Определите аналоговый стиль.
Для биполярного шагового двигателя, запрещающего связывать промежуточную точку, плоскую точку, которая может быть разделена пополам.
Retningen af step-motoren ændres ved at vende en af sinusstrømmene – f.eks. вел и венде en af spolernes strømfaser 180 грейдер. Мужчины inden dette sker skal step-motoren få bragt sin hastighed ned til stilstand, hvorefter den nyerotsretning starts.
Подключить к 2 вексельстрёмам к ф.экс. være en lavfrekvens «тон»-генератор med variabel frekvens (линейные «часы»).
«Tone»-generatoren skal kunne sættes helt i stå i en vilkårlig fase. Dette betyder и den kan være trinløs/step-løs.
Dette er den næsten ideelle fødning af en stepmotor.
I sædvanlig praksis anvender man ikke lineare effektforstærkere, men derimod «on-off»-«forstærkning». Dette kaldes digitalstyring.
Вкл./выкл. стилизация может включать как хелстеп, так и полушаг.
Цифровой тональный генератор или часы, установленные на цифровом генераторе тонов, и простые часы, а также часы с эффектом жесткости. Der afsættes mindre energi/effekt i effektforstærkerne.
Цифровой вход styresignaler[redigér | rediger kildetekst]
- Pulsgiver, taktgiver (Clock, CLK) – som bestemmer stepmotorensrotorhastighed og faktisk antal skridt, step (eller halvskridt).
- Retningen (направление, реж.)
- Ев. signal om taktstyresignalet signalerer helskridt eller halvskridt.
 signal om taktstyresignalet signalerer helskridt eller halvskridt.
signal om taktstyresignalet signalerer helskridt eller halvskridt.En kredsløbsblok kaldet «переводчик»[redigér | rediger kildetekst]
Формируйте блокировку для часов и счетчиков до контрольного сигнала «водителя».
Однополярный
- Обязательный сигнал 1 до hver af de 4 spoleender, som signalerer om de skal have strøm eller ikke.
Биполярный
- Обязательный риск er 2 fase-signaler til hver fuldbro, som signalerer om hver fuldbros 2 grene skal være lave eller høje. Herudover 2 kontrolsignaler til hver sin fuldbro, som signalerer om broens udgange skal være svævende.
- Блок стиралки через драйвер с 2-мя переключателями с цифровым эффектом (вкл., выкл.). Men da styringen er digital, kan der i kortere tid ske det, at the den ene gren i en brokoblet forstærker forstærker signal om at både nedre og øvre транзистор skal være «on». Dette udløser en «katastrofe», hvor en eller begge Transformer brænder af. Derfor skal man sikre sig at «translator» или «driver»-blockken forhindrer dette med det rette design. Det der skal til, er et kortvarigt tidspunkt, hvor begge trafficer for off signal, så den af dem der var «on» for tid til at slukke. Dette kaldes er «мертвое время» tidsintervallet.
 Derfor skal man sikre sig at «translator» или «driver»-blockken forhindrer dette med det rette design. Det der skal til, er et kortvarigt tidspunkt, hvor begge trafficer for off signal, så den af dem der var «on» for tid til at slukke. Dette kaldes er «мертвое время» tidsintervallet.
Derfor skal man sikre sig at «translator» или «driver»-blockken forhindrer dette med det rette design. Det der skal til, er et kortvarigt tidspunkt, hvor begge trafficer for off signal, så den af dem der var «on» for tid til at slukke. Dette kaldes er «мертвое время» tidsintervallet.«Водитель»[редактор | rediger kildetekst]
«Драйвер» — заблокирован в логове, так же как и ndrer on/off signalerne fra logikspænding «5V» til spændinger og strømme, der er anvendelige til and styre effekttransistorer.
Конструкция драйвера включает в себя шаговый двигатель, однополярный или биполярный.
Эффекттранзистор[переделка | rediger kildetekst]
Den sidste blok er seve efekttransistorerne, som evt. Кан Креве Кёлинг. Предотвратите нормальный переход от диода к транзистору. Эффект МОП-транзисторов с жестким диодом.
Эффект-транзистор, размещаемый на шаговых двигателях: однополярный (с подтягивающим или подтягивающим эффектом транзисторов, 4 шт.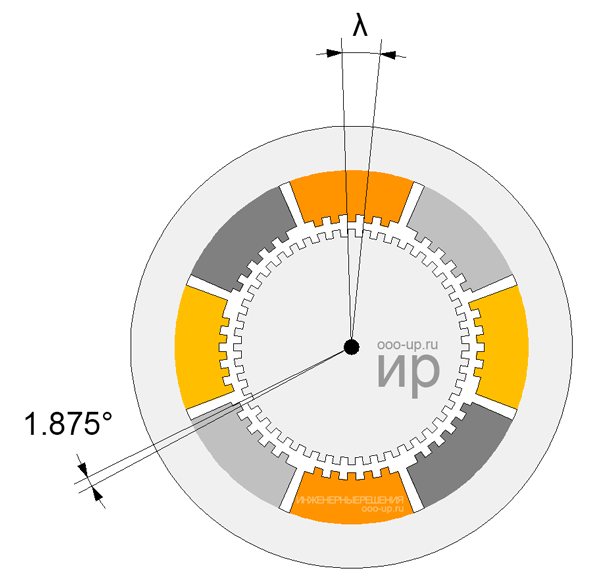 ) или биполярный (2 полных транзистора; 8 эффектных транзисторов).
) или биполярный (2 полных транзистора; 8 эффектных транзисторов).
«Драйвер» и эффект транзисторного блока с улучшенными эффектами.
Hvis en stepmotorstyring skal kunne styres i mindre trin/step endhalve, så skal translationblocken ndres, så output er Analoge signaler evt. я трин. Man for brug for D/A-konvertere. В качестве альтернативы можно использовать более эффективный метод импульсной демодуляции (ШИМ).
Dette kræver igen at effektforstærkeren også eller simulerer аналоговый/линейный og f.eks. класс B, класс D (в соответствии с PWM). Мужчины omkostningen Ved anvendelse аф класса B og Cer и др. Stort effekttab я effektforstærken. Kun hvis classe D eller PWM anvendes, vil effekttabet kunne være lavt.
Блок-переводчик с цифровым управлением, цифро-аналоговым выходом или выходом ШИМ, который может быть установлен/реализован/имитирован в микроконтроллере (например, в PIC).
- Текст менеджер , hjælp os med at skrive texten
- Годт документ: STMicroelectronics: Управление шаговым двигателем (нажмите на символ pdf)
- Принцип действия шагового двигателя Аркиверет 10 апреля 2005 hos Wayback Machine
- Вкл. vejviser: epanorama.net: Шаговые двигатели
- Управление шаговыми двигателями. Учебник Дугласа В. Джонса
- piclist.com: Управление биполярными шаговыми двигателями, копия
- Контроллер шагового двигателя PIC с вспомогательным кодом.
- Current Control in Stepper Motors Arkiveret 3 апреля 2005 г. hos Wayback Machine Ved hjælp af dette kredsløb kan drejningsmomentets styrke bibeholdes for større hastigheder. (Der er 2 fejl i det første диаграмма. Forbindelsen mellem BDW84 base og jord skal fjernes og коллектор и байты эмиттера). .HCT удгавер)) (pdf)
- Загрузите последние исходники PICStep (2*LMD18245+PIC16F628A) Arkiveret 12 июня 2005 г. hos Wayback Machine
- PIC16F84 baseret: Шаговые контроллеры могут быть СИЛЬНЫМИ, плавными и дешевыми! ЛиниСтеппер! (с открытым исходным кодом под лицензией GPL)
- «Шаговый двигатель» проект
- Галерея схем PIC: Контроллер шагового двигателя Аркиверет 22 мая 2005 г. hos Wayback Machine
- Проекты своими руками Аркиверет 4. апрель 2005 hos Wayback Machine Mange шаговый моторстирингер.
- Phasegen Arkiveret 22 июня 2005 г. Wayback Machine простая однополярная стилизация с сохранением и ускорением.
- Чрезвычайно простая схема на рис. 1 приводит в действие шаговый двигатель напрямую от источника питания 12 В переменного тока, 60 Гц. 90 класс.
 vejviser: epanorama.net: Шаговые двигатели
vejviser: epanorama.net: Шаговые двигатели апрель 2005 hos Wayback Machine Mange шаговый моторстирингер.
апрель 2005 hos Wayback Machine Mange шаговый моторстирингер.- База МОП-транзистора:
- allegromicro.com Аркиверет 10 мая 2005 г. hos Wayback Machine Se под ф.экс. по A3982..A3984.
- Tekst Mangler , hjælp os med at skriv teksten
- Драйвер МОП-транзистора:
- Драйвер Halvbroer: IR2184, (IR21844 с мертвым временем бен и større afstand mellem high og low ben). Старт 10..600В макс.
- Драйвер Halvbroer: LM5104 – высоковольтный полумостовой драйвер затвора с адаптивной задержкой 9..100 В макс.
- HIP4081A (с эффектом MOSFET, биполярный, полный, макс. 10..80 В) редигер килдеттекст]
- MOSFET baserede:
- LMD18245: 3A, 55V DMOS Full-Bridge Драйвер двигателя (0,25 Рон, стромстиринг)
- LMD18200: 3A, 55V DMOS Full-Bridge Motor Driver Аркиверет 4 апреля 2005 г. hos Wayback Machine
- База биполярного транзистора:
- UDN2916 datablad (pdf) Аркиверет 14 мая 2005 г. Wayback Machine биполярный 10..45В и 750мА.
- Anvendelseseksempel: L298 «сильноточный двойной мостовой драйвер, предназначенный для приема стандартных логических уровней TTL» (pdf) 46 В макс.
Драйвер шагового двигателя — RepRap
Чтобы запустить шаговый двигатель, необходимо использовать
- возможно A4988
- или, возможно, DRV8825
- или, возможно, Trinamic TMC2130
Вы можете купить любой из них в магазине по вашему выбору.
Содержимое
- 1 иначе, читайте дальше,
- 2 Управление шаговыми двигателями
- 2.1 Драйвер шагового двигателя
- 2.2 Драйверы шаговых двигателей на базе микроконтроллеров
- 3 драйвера шагового двигателя с открытым исходным кодом
- 3.1 АВРСТМД
- 3. 2 Доктор Игуана
- 3.3 Драйвер шагового двигателя RepRap v1.x
- 3.4 Драйвер шагового двигателя RepRap v2.x
- 4 Драйверы шаговых двигателей и контроллеры шаговых двигателей
- 5 Драйверы ШИМ и шаговых двигателей
- 6 чипов драйвера шагового двигателя
- 7 Драйверы шаговых двигателей
- 8 Компенсация среднечастотного резонанса
- 9 Поиск и устранение неисправностей
- 9.1 Модули Pololu
- 9.2 защита
- 10 Дальнейшее чтение
в противном случае, читайте дальше,
- чип драйвера шагового двигателя или
- микроконтроллер и, опционально, один или два полноценных чипа h-bridge.
Драйвер шагового двигателя
Драйвер шагового двигателя
Эти микросхемы отделяют питание двигателей от питания Arduino. Arduino не может обеспечить достаточное количество энергии для прямого питания шаговых двигателей. Вот почему вы должны использовать отдельные микросхемы, которые действуют как клапаны, управляющие вращением двигателя.
Еще одно преимущество, которое обеспечивают микросхемы драйверов шаговых двигателей, заключается в том, что они обеспечивают дробных шагов. Это помогает сгладить движение шагового двигателя. Без дробных шагов шаговые двигатели могут иметь тенденцию вибрировать или резонировать при определенных оборотах.
Драйверы шаговых двигателей на базе микроконтроллеров
Драйверы шаговых двигателей на основе микроконтроллеров могут достигать очень высоких скоростей вращения шаговых двигателей. Используя микроконтроллер, можно полностью контролировать то, как именно каждая отдельная катушка подается под напряжение внутри двигателя. Это абсолютно необходимо для получения высоких скоростей, потому что по мере увеличения скорости время срабатывания катушек должно быть идеально синхронизировано. Цитата из доктора Игуаны:
- Если вы когда-нибудь толкали кого-то на качелях, вы знаете, что небольшой, своевременный толчок может заставить этого человека раскачиваться все выше и выше. Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
Чтобы обрабатывать ток выше, чем может позволить микропроцессор, контроллер должен использовать микросхемы полного H-моста.
Обычно Н-мост используется для управления старым добрым двигателем постоянного тока, но в данном случае микросхемы Н-моста используются для точного управления количеством электричества, поступающего на каждую отдельную катушку шагового двигателя. Таким образом, для биполярных шаговых двигателей требуется 2 микросхемы на двигатель.
Драйверы шаговых двигателей с открытым исходным кодом
AVRSTMD
AVRSTMD — драйвер шаговых двигателей с открытым исходным кодом на основе микроконтроллера. Он использует процессор atmega48 и два чипа h-bridge с ограниченным током National Semiconductor LMD18245T.
Dr. Iguana
Драйвер шагового двигателя Dr. Iguana основан на микроконтроллере dsPic33 и двух чипах L298N H-Bridge. Он может развивать скорость до 800 об/мин. Очень хороший источник информации о шаговых драйверах микроконтроллеров можно найти на его веб-сайте здесь вместе со всеми схемами, файлами gerber, исходным кодом и спецификацией шагового драйвера.
Доктор Игуана. «Лучший драйвер шагового двигателя своими руками». Серия страниц (и видео), на которых даны советы по проектированию высокоскоростных драйверов шаговых двигателей.
Драйвер шагового двигателя RepRap v1.x
- устарело*
Первое поколение драйверов шаговых двигателей RepRap.
(Примечание: эти платы использовались в коллекции электроники 2-го поколения.) Используется комбинированный драйвер шагового двигателя L297/L298. Полушаг. Выдерживает до 2А. Все сквозное отверстие. Хороший, солидный водитель. Он использует некоторые старые технологии, так что он не такой модный, как более новые драйверы шаговых двигателей, но он выполняет свою работу. Прочтите страницу документации здесьДрайвер шагового двигателя RepRap v2.x
- устарело*
Второе поколение драйверов шаговых двигателей RepRap.
(Примечание: эти платы использовались в коллекции электроники 3-го поколения, но их можно было обновить до поколения 2.)Использует микросхему Allegro A3982, которая делает множество приятных вещей и значительно упрощает плату. Это также снижает цену на 10 долларов по сравнению с серией v1.x. Он может выдерживать до 2А и работает в полушаге. Единственным недостатком является то, что это SMT, что может немного пугать людей. Это все большие детали SMT, поэтому их довольно просто паять, особенно с помощью паяльной пасты/горячей пластины. Прочтите страницу документации здесь.
Трехосевой драйвер шагового двигателя PSMD имеет все те же разъемы и является совместимой по выводам альтернативой драйверу шагового двигателя RepRap v2.x.
Драйверы шаговых двигателей и контроллеры шаговых двигателей
Для работы шагового двигателя обычно требуются две вещи: контроллер для создания сигналов шага и направления (обычно ±5 В) и схема привода, которая может генерировать ток, необходимый для привода двигателя.
. В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.Контроллер шагового двигателя управляет тремя проводами, традиционно помеченными как «шаг», «дир», «GND», которые передают информацию о движении к драйверу шагового двигателя. (Часто эти 3 линии оптоизолированы на переднем конце драйвера шагового двигателя). Шаговый контроллер обычно представляет собой чисто цифровое логическое устройство и требует относительно небольшой мощности.
Драйвер шагового двигателя подключается к 4 толстым проводам шагового двигателя. Он содержит большие силовые транзисторы и требует толстого силового кабеля для источника питания постоянного тока, потому что вся мощность для привода двигателей проходит через него.
Драйверы ШИМ и шаговых двигателей
Подавляющее большинство драйверов шаговых двигателей подключены к какому-либо контроллеру с 3-проводным интерфейсом: контроллер подает импульс на вывод STEP, чтобы переместить двигатель на один шаг (*), контроллер устанавливает вывод DIR, чтобы выбрать, шаг — это шаг по часовой стрелке или шаг против часовой стрелки и общий контакт GND.
Из Википедии:Широтно-импульсная модуляция:
Широтно-импульсная модуляция (ШИМ) — очень эффективный способ обеспечения промежуточного количества электроэнергии между полностью включенным и полностью выключенным. Простой выключатель питания с типичным источником питания обеспечивает полную мощность только при включении. ШИМ — это сравнительно новый метод, который стал практичным благодаря современным электронным переключателям питания.Драйверы шаговых двигателей обычно работают, уменьшая напряжение питания с помощью встроенной микросхемы ШИМ. Эти чипы требуют незначительной вспомогательной схемы (это основное, за что вы платите, покупая драйвер шагового двигателя). Сами чипы PWM обычно имеют цену за единицу ниже 10 долларов США, в основном в зависимости от их номинального тока.
Драйвер прерывания, также известный как драйвер ограничения тока, поддерживает работу двигателя и ток в двигателе на безопасном уровне, даже при управлении двигателем «3 В» от источника питания «24 В».
Все перечисленные здесь микросхемы имеют «тепловое отключение».(*) Многие микросхемы также имеют встроенный микрошаг. Когда микрошаговый режим включен, каждый импульс на выводе STEP перемещает двигатель на один микрошаг.
Микросхемы драйвера шагового двигателя
Вот список микросхем драйвера шагового двигателя (самые новые сначала):
Производитель Модель Пиковый ток Пакет Дополнительные примечания Тринамик «Шаговый драйвер и контроллер 5041» 1,1 А (?) QFN48 (7×7) управляет осью Z в T-Bone.[1][2] Тринамик Контроллер движения TMC4361 + драйвер шагового двигателя Trinamic TMC2660 2,6 А (?) QFP44 управляет осями X, Y, E в T-Bone.[3][4] Аллегро А4989 10 А ЦСОП38 A4989 предназначен для управления N-канальными МОП-транзисторами с внешним питанием. А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986.STMicroelectronics Л6470 7 А HTSSOP28 или POWERSO36 Дважды использовался в RepRap. Прошивка RepRap на базе Marlin с поддержкой L6470. Репрап печатная плата. Файл:Шаговый двигатель GE версии 0.8b.sch, Файл:Шаговый двигатель GE версии 0.8b.brd, Файл:Reprap.lbr.
Библиотека ArduinoL6470 на Github.
STMicroelectronics L9942 1,3 А PowerSSO24 SPI. Диагностические флаги для обнаружения опрокидывания, предупреждения о перегреве, отключения при перегреве, открытой нагрузки, перегрузки. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. Тринамик TMC249A [5][6] 4 А SO28 SPI. Флаги состояния для обнаружения опрокидывания, перегрузки по току, разомкнутой нагрузки, перегрева, предварительного предупреждения о перегреве, пониженного напряжения. измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами).HHBYtech THB7128 3,3 А ХЗИП19 Рекомендуется для электроники Gen7T. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у TB6600HG) и менее требовательный к дизайну окружающей печатной платы. Тошиба ТБ6560АХК 3,5 А ХЗИП25 и ХКФП64 Используется в электронике Gen7T, Sanguish и Sanguinoshiba, а также в драйвере шагового двигателя с открытым исходным кодом для экологии с открытым исходным кодом [нужна ссылка] . См. также: Контроллер платы драйвера шагового двигателя с ЧПУ 4 Axis TB6560. Тошиба ТБ6600ХК; ТБ6600ХГ 4,5 А ХЗИП25-П-1. 00ФИспользуется в драйвере шагового двигателя PiBot TB6600. Протестировано на GEN7V1.4-1.41 и PiBot для Repetier V1.0-1.4. По сравнению с TB6560AHQ лучшее расположение контактов (например, все контакты разъема двигателя с одной стороны, как у THB7128). Аллегро А3967 0,75 А СОИК Используется в платах Easy Driver, продаваемых на Sparkfun. Не уверен, что их можно использовать в RepRap, но они хороши для экспериментов. Немного маломощный, всего 750 мА/фаза. Аллегро А3977 2,5 А ПЛКК или ТССОП Заброшено в драйвере шагового двигателя версии 2.0. Аллегро А3979 2,5 А ЦСОП Заброшен из-за крошечного размера в версии 2.1. Аллегро А3982 2 А СОИКВ Улучшено по сравнению с версией 1.2 в версии 2.2. Также используется в драйвере шагового двигателя версии 2. 3.Аллегро А3992 1,5 А DIL или TSSOP Используется в электронике поколения L. Аллегро А4984 2 А ТССОП или КФН Используется в Stepsticka4984. Полный, 1/2-, 1/4- и 1/8-шаговый режимы. защита двигателя от короткого замыкания. Почти идентичен A4988, за исключением того, что в нем отсутствует контакт «M3», который указывает на микрошаг 1/16, и некоторые люди предпочитают этот пакет TSSOP пакету QFN. Аллегро А4983 2 А КФН Продукт снят с производства, заменен на A4988. Используется в коммутационной плате A4983. Аллегро А4988 2 А КФН Используется в платах драйверов шаговых двигателей Pololu и драйвере G3D. Идентичен и совместим по выводам с A4983, но также имеет подтяжку на M1 и защиту двигателя от короткого замыкания. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы.Техас Инструментс ДРВ8811 2,5 А ХТСОП Используется в электронике 6-го поколения. Вероятно, поэтому прошивка FiveD была изменена. STMicroelectronics Л297 DIP20 или SO20 Преобразует входы «step, dir» в 6-контактные выходы «последовательности фаз», которые подключаются к двойному полному мосту, такому как L298. Полный и полушаговый режимы. Последним драйвером шагового двигателя, который использовал это, был драйвер шагового двигателя 1.2. STMicroelectronics Л298 4 А Мультиватт15 или PowerSO20 Двойной полный мост. При правильном подключении к чему-то вроде L6506 или L297, как и в Драйвере шагового двигателя 1.2, L298 может быть использован для построения драйвера прерывающего двигателя (с ограничением по току). Когда его сенсорные выходы напрямую подключены к земле, как в Valkyrie Redux, ограничение тока отсутствует. Техас Инструментс СН754410 1 А ДИП 16 Двойной полный мост. «Улучшенная функциональная замена … L293». Без ограничения тока (кроме теплового отключения). STMicroelectronics Л293Д 0,6 А Powerdip 16 или SO20 Двойной полный мост. Множественные могут быть сложены друг на друга, чтобы разделить силу тока. Без ограничения тока. Техас Инструментс ДРВ8825 2,5 А 28HTSSOP ДРВ8825; используется в Replicape, некоторых платах AZSMZ Mini и некоторых (всех?) платах Azteeg X5. До 1/32 шага. Столбец «Пиковый ток» дико оптимистичен.
(Видеть
«Миф о водителе»
).Корпуса со сквозными отверстиями считаются самыми простыми для пайки вручную («HZIP», «DIL», «DIP», «Powerdip» и т. д.).
«SOIC» и «PLCC» — это относительно простые в пайке корпуса для устройств поверхностного монтажа.
Корпуса для поверхностного монтажа «TSSOP», «QFP» и «QFN» трудно паять вручную.В резервной копии веб-архива есть хорошая сравнительная таблица и обзор микросхем драйверов микрошагов: «Обзор драйверов биполярных микрошагов по состоянию на август 2013 года» (через «Альтернативные драйверы шаговых двигателей?»).
Драйверы шаговых двигателей
Поиск драйверов шаговых двигателей может быть немного сложным. Драйверы шаговых двигателей RepRap V2.3 очень трудно приобрести в предварительно собранном виде. Строители, обладающие небольшими навыками, могут найти детали и собрать контроллеры. Те, у кого нет навыков или материалов для сборки плат, могут купить обычные драйверы шаговых двигателей. В Европе, как правило, более рентабельно получить предварительно собранные платы, чем покупать детали и выполнять сборку своими руками.
Доступные драйверы шаговых двигателей Производитель Проверено? Местоположение Максимальный ток Микрошаг Комментарии Драйвер шагового двигателя 2. 3 (с использованием A3982)Да США 2 А 1/2 Внесен в список для сравнения. Ступенька Да Открытый исходный код 2 А 1/16 Совместимость по выводам
и очень похожие характеристики на плату драйвера шагового двигателя Pololu. СайлентСтепСтик Да Открытый исходный код 1,7 А 1/16 Драйвер Trinamic TMC2100. Аппаратное обеспечение, совместимое с StepStick и платой драйвера шагового двигателя Pololu. Плата драйвера шагового двигателя Pololu Да США 2 А 1/16 Может сильно нагреваться; требуется активное охлаждение вентилятором или пассивный небольшой радиатор свыше ~0,5 А. МКС TB6600 (с использованием TB6600) Да Китайская Народная Республика 4,5 А 1/1,1/2А,1/2В, 1/4,1/8,1/16 *Это решение, подходящее для вашего станка с ЧПУ и 3D-принтера, позволяет легко преобразовать ваш ЧПУ в 3D-принтер. *Предельное входное напряжение: 45 В.EasyDriver (с использованием A3967) Да США 0,75 А 1/8 Немного слабее по сравнению с другими драйверами, всего 750 мА/фаза. Bothacker использует EasyDriver[7] и сообщает, что его мощности достаточно для Mendel. Рекомендуемые. … ay.com/autohec 4-осевой контроллер драйвера шагового двигателя (с использованием A3977) Да США 2,5 А 1/8 4 шаговых драйвера на одной плате. PiBot_TB6600_Stepper_Driver (с использованием Toshiba 6600HQ) Да Китайская Народная Республика 0–4,5 А 1/1,1/2А,1/2В, 1/4,1/8,1/16 - Плата PiBot_Stepper_Driver — это плата драйверов с открытым исходным кодом.
- предлагает решение, которое подходит для вашего станка с ЧПУ и 3D-принтера, легко превращая ваш ЧПУ в 3D-принтер.
- NEMA14 и NEMA17.
- , используемая во входном порту, совместима с более высоким уровнем привода.
- Носите с собой алюминиевый радиатор 60*60*10, датчик внешнего сопротивления 6*1 Вт. Более мощный ток драйвера.
- Предельное входное напряжение: 45 В.
- Защита от перегрева (TSD), защита от блокировки при пониженном напряжении (UVLO), защита от обнаружения перегрузки по току (ISD).
Совместимость с шаговыми двигателями
Фотоэлектрическая изоляция
DIY ЧПУ Нет ГБ 2,5 А 1/8 Может управлять 1 шаговым двигателем; скидка при покупке нескольких. Моторный щит Arduino Нет США 0,6 А ? Требуется Arduino в качестве контроллера. Может управлять 2 сервоприводами, 4 двигателями постоянного тока или 2 (биполярными или униполярными) шаговыми двигателями. Веб-сайт отмечает, что вы можете увеличить максимальный ток, вставив (припаяв чип к чипу) еще один L29. 3D-чип поверх первого (и еще один поверх него)… ay.com/?_from=R40&_trksid=p3907.m38.l1313&_nkw=4+axis+TB6560&_sacat=Просмотреть все категории TB6560AHQ на основе Нет ГБ/кн. 1,5–3 А 1, 1/2, 1/8, 1/16 Может управлять от 3 до 5 шаговых двигателей в зависимости от модели; читать далее. Драйвер шагового двигателя 2.3 Клон от kymberlyaandrus Да США 2 А 1/2 Та же схема, но физически меньше оригинальной версии. Подстроечный потенциометр не имеет начальной/конечной точки, поэтому регулировка тока может быть более сложной, чем на других досках. Клеммные колодки хороши тем, что не требуют изготовления специальных разъемов. Гекко Драйв Да США 3,5 А 1/10 (только) Может управлять 4 шаговыми двигателями Нанотек SMC11 Да НЕМЕЦКИЙ 1,4 А 1/16 с охлаждением до 2,5 А LiniStepper от Романа Блэка нет США 3 А 1/18 и «бесступенчатый» Открытый исходный код: принципиальная схема, компоновка печатной платы (платы) и программное обеспечение PIC. Шаговый двигатель Tri Duino ??? ??? ??? ??? Открытый исходный код A3979прорыв ??? ??? ??? ??? ??? грблшилд Нет США 2,5 1/8 3-осевой контроллер подключается к Arduino Uno или аналогичному Сравнение драйверов шаговых двигателей PMinMo.
Компенсация среднеполосного резонанса
Драйверы Gecko имеют функцию, называемую компенсацией среднеполосного резонанса, которая предотвращает остановку шаговых двигателей из-за проблем с резонансом, которые могут возникнуть, когда двигатель вращается в диапазоне 5-15 об/мин. Это может быть очень полезно, например, при управлении шаговыми двигателями на мельнице Tiag. Однако шаговые двигатели в Mendel никогда не работают вблизи этого диапазона, поэтому компенсация резонанса средней полосы не дает никакой пользы для сборки Mendel.
Модули Pololu
- Шаговый двигатель «дрожит»
- Модули Pololu отключаются, когда они слишком горячие. Обеспечить надлежащее охлаждение.
- Шаговый двигатель потребляет слишком много ампер
- Модули Pololu имеют небольшой потенциометр SMD для регулировки тока. Подключайте шаговый двигатель по одному и регулируйте силу тока, пока не будете удовлетворены настройкой.
- Отрегулируйте так, чтобы шаговые двигатели могли удерживать крутящий момент, но не перегревались. Лично я приближаюсь к силе тока, указанной на катушку.
защита
Транзисторы, которые чаще всего выходят из строя в RepRap, — это транзисторы, напрямую подключенные к двигателю.
Кажется, в ответ есть три точки зрения:- позволяют легко заменить эти транзисторы, когда они неизбежно выходят из строя, или
- каким-то образом защищает эти транзисторы, так что они вряд ли выйдут из строя даже в условиях обычной неисправности — Protected Mosfet или
- оба.
.
Современные драйверы шаговых двигателей имеют «тепловое отключение» —
когда они чувствуют, что им становится слишком жарко,
они автоматически все выключают и дают всему остыть.
Это может испортить вашу пластиковую печать,
но, по крайней мере, не было нанесено необратимого ущерба.
(Это не означает, что современные драйверы шаговых двигателей не могут быть окончательно уничтожены;
вы просто будете умнее в том, как вы это делаете).В частности, я слышал, что драйверы двигателя часто выходят из строя, когда двигатель отключается при включенном питании.
( Устранение неполадок # Проблемы с электричеством,
Обсуждение: Монотроника,
RepRapPro Настройка токов двигателя,
RAMPS 1.4 # Предполетная проверка,
так далее.)
Что такое режим отказа?
Есть ли способ спроектировать драйвер двигателя, чтобы он был невосприимчив к таким отказам?
Предпочтительно, чтобы это стоило меньше, чем просто покупка нового «носителя драйвера шагового двигателя» за 11 долларов каждый раз, когда я его выдуваю?- Шаговый двигатель
- Контур управления двигателем
- У альтернативной электроники есть некоторые соображения по дизайну для людей, проектирующих контроллеры шаговых двигателей и другую электронику.
- MOSFET baserede:
 hos Wayback Machine
hos Wayback Machine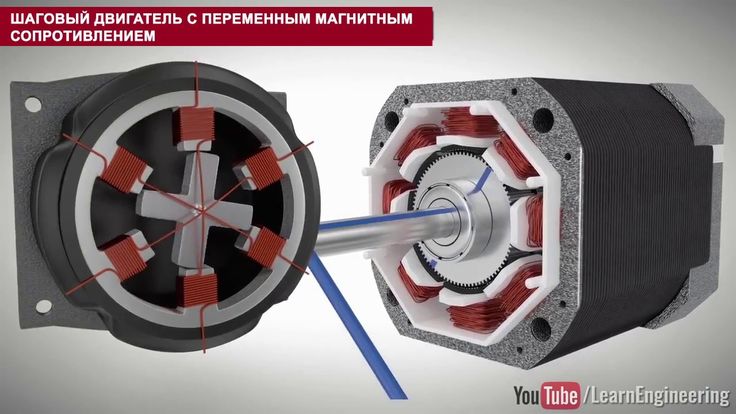 2 Доктор Игуана
2 Доктор Игуана
 Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
Пропустите толчок или два даже на небольшую величину, и «передача мощности» будет значительно меньше. Так обстоит дело с шаговыми двигателями на высоких скоростях. Если вы не сопоставите толчки или шаги с фактическим состоянием двигателя, он будет работать плохо.
 Прочтите страницу документации здесь
Прочтите страницу документации здесь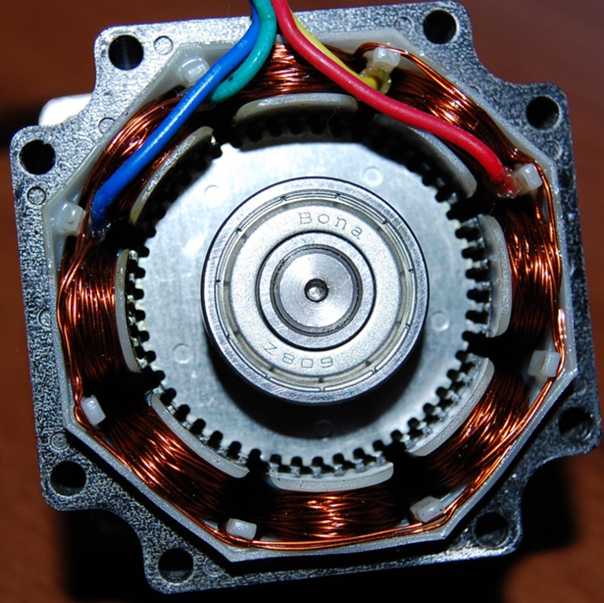 . В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.
. В некоторых случаях очень маленький шаговый двигатель может управляться напрямую от контроллера, или схемы контроллера и драйвера могут быть объединены на одной плате.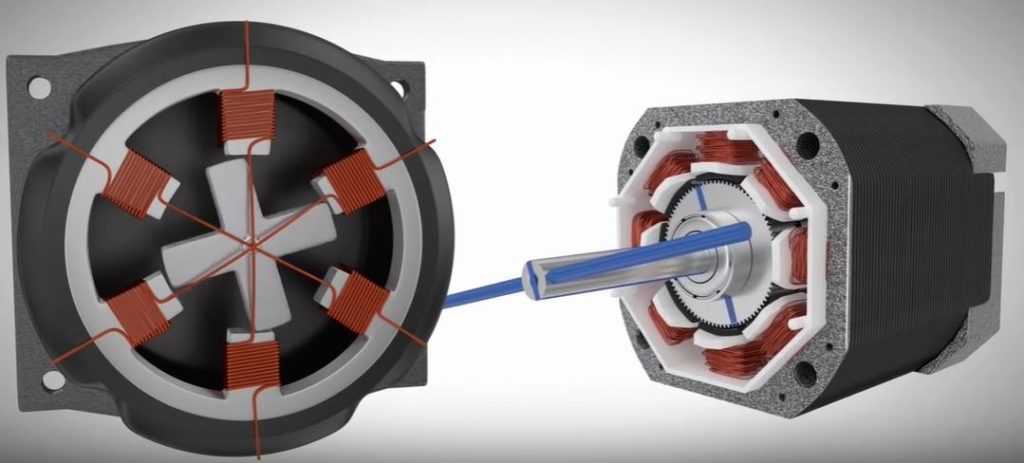

 А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986.
А4989 в Powerlolu (Powerlolu) управляет полевыми МОП-транзисторами IRLR024N, которые позволяют ему управлять 10 А. Вывод, совместимый с A3986. измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами).
измерение нагрузки. Управляет 8 внешними полевыми МОП-транзисторами — в техническом описании приведен список рекомендуемых силовых транзисторов. Сменная замена для TMC239. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы (1/64-шаг с дополнительными компонентами). 00Ф
00Ф 3.
3. Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы.
Полный, 1/2-, 1/4-, 1/8- и 1/16-шаговый режимы.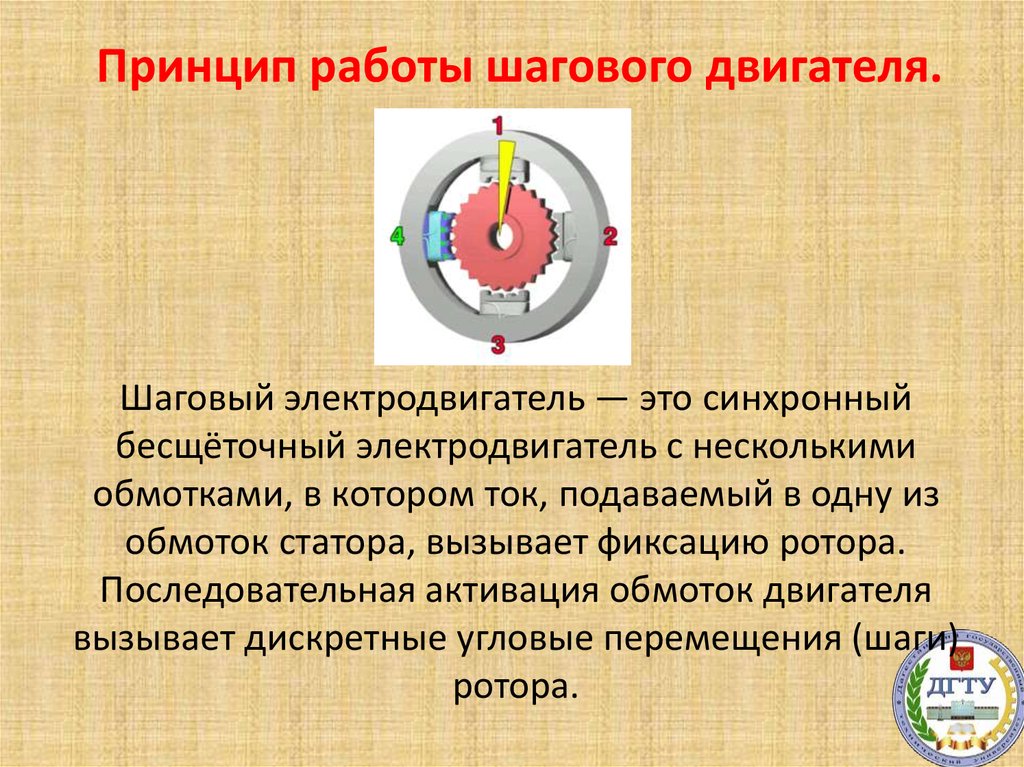
 3 (с использованием A3982)
3 (с использованием A3982) *Предельное входное напряжение: 45 В.
*Предельное входное напряжение: 45 В.
 3D-чип поверх первого (и еще один поверх него)
3D-чип поверх первого (и еще один поверх него)